

- Создание электронных устройств: уровни и методы
- Начало
- ЛУТ и паяльник
- Начальный уровень систематизации
- Средний уровень систематизации
- Perle Event Logger
- Высокий уровень систематизации
- Enterprise уровень
- Анализ систем ECAD, PLM и MCAD в России
- ECAD
- Историческая ретроспектива развития мировых ECAD систем
- PLM
- Источник Управление жизненным циклом продукта для отдельных производителей
- MCAD
- Почему не используем EDM?
- Так как же правильно разрабатывать электронику?
- База элементов
- Работа с проектами плат
- Интеграция ECAD-MCAD
- Резюме
- Полезные ссылки
- ▍ Расчёт параметров коронного кольца
- ▍ Расчёт и построение циклоидального диска
- ▍ Построение коронного кольца
- ▍ Расчёт и построение выходного вала и эксцентрика
- ▍ Результаты и заключение
Создание электронных устройств: уровни и методы
Все электронные гаджеты, окружающие нас, были кем-то придуманы, формализованы в электрической схеме. Для них были спроектированы печатные платы, заказаны и установлены комплектующие, и в итоге было собрано готовое изделие. Каждый из этих этапов может быть реализован совершенно по-разному: от “ручной” самодеятельности до полностью автоматизированного цифрового подхода.
В этой статье в блоге ЛАНИТ мы расскажем и покажем все уровни и варианты создания электронных устройств и подробно опишем новейшие технологии в проектировании электроники.
Начало
Сразу надо сказать, что каждый из подходов имеет право на существование. Сложность устройств может быть совершенно разной, и нет смысла использовать систему проектирования высшего класса для создания домашней цветомузыки. Так же необходимо относиться к изделиям с повышенными требованиями по надежности, электромагнитной совместимости, сверхвысокочастотными характеристиками и другими параметрами ― такие изделия не следует разрабатывать в САПР начального уровня или в САПР двадцатилетней давности, хотя иногда и такое можно встретить.
ЛУТ и паяльник
На этом уровне печатная плата может изготавливаться из подручных средств и купленного в магазине фольгированного стеклотекстолита. Топология проектируется в Sprint Layout или Kiсad, печатается на лазерном принтере и переносится на фольгированный стеклотекстолит с последующим химическим травлением рисунка платы. Обычно такие изделия создают радиолюбители для домашнего использования. Нет никакой документации, кроме схемы и PDF Datasheet на микросхемы. Элементы покупают в магазине радиодеталей, сверловку и пайку производят вручную.
Иногда на этом уровне могут разрабатывать довольно качественные устройства небольшими партиями, заказывать их в Китае вместе с комплектующими и собирать готовые. Исходные проекты хранятся исключительно на ПК либо в облаке, очень редко ― в Git.
Начальный уровень систематизации
Это начальный уровень коммерческого предприятия по проектированию электронных изделий. Здесь уже есть некие шаблоны действий при разработке электроники, унификация действий и используемых схемотехнических и конструкторских приемов. Могут использоваться личные библиотеки элементов или даже библиотеки на уровне отдела. В обязательном порядке разрабатывается конструкторская документация, чаще всего вручную в отдельных CAD-системах. Исходные проекты печатных плат могут храниться локально на компьютерах пользователей или в лучшем случае централизованно на общем сервере.
Система проектирования печатных плат в основном P-CAD 2006, поддержка которого была давно прекращена, либо Altium Designer, если на предприятии пришло новое поколение разработчиков.
Связь с механическими CAD либо вообще отсутствует, либо осуществляется через нейтральные форматы STEP/Parasolid, при которых отсутствует двусторонний обмен между ECAD-MCAD, и модели в MCAD будут каждый раз состоять из импортированных новых моделей.
Средний уровень систематизации
Perle Event Logger
На этом уровне уже применяются системные подходы в проектировании.
Есть единая библиотека элементов, которая используется только на уровне инженеров по разработке электроники.
Может быть внедрена EDM-система (ECAD Data Management) для управления данными, хранения проектов, как, например, Altium On-Prem Enterprise Server (бывшее название Altium Concord Pro).
Но эта система работает локально только на уровне отдела и не связана с другими подразделениями предприятия.
Полноценная конструкторская документация выпускается либо вручную, либо с применением сторонних плагинов и дополнительных программ для оформления.
Обмен данными с механическими CAD происходит либо через нейтральные форматы, либо с применением дополнительных плагинов для обмена данных, работающих только через EDM.
Возможно, что присутствует в некотором виде PLM-система (Product Lifecycle Management), которая используется только как место хранения исходных проектов без настроенных процессов взаимодействия между отделами и полного жизненного цикла разработки изделия.
Высокий уровень систематизации
Источник Управление жизненным циклом изделия
Этот уровень подразумевает полноценное использование всех преимуществ ECAD-, MCAD- и PLM-систем для обеспечения целостного сквозного маршрута проектирования электроники.
На предприятии используется общая полноценная библиотека компонентов, с которыми работают все отделы ― от разработчиков до технологов и менеджеров снабжения.
Вся разработка фиксируется на каждом этапе в плане-графике.
Задания на разработку выдаются через PLM-систему со ссылками на конкретные объекты в системе с описанием необходимых работ.
Все результаты при каждом шаге также сохраняются в единую систему, настроена полная прослеживаемость изменений и процессы согласования и утверждения проектов.
Enterprise уровень
Все печатные платы имеют полноценные электронные структуры и модели в MCAD, которые тоже состоят из полноценных библиотечных MCAD-моделей.
Проекты плат и их модели являются подлинниками изделий, и при необходимости наличия бумажной документации она формируется в виде производных отчетов из этих подлинников.
Есть связь между проектами печатных плат и MCAD с двусторонним обменом данных между системами.
Применяются методы анализа разработок на каждом этапе: цифровое и аналоговое моделирование работы схемы SPICE Simulation, предтопологический анализ целостности сигналов платы, SI/PI топологические анализы, технологические DFM/DFA анализы собираемости печатных плат.
К трехмерным моделям печатных узлов применяются технологии инженерного анализа: тепловые расчеты, механические, анализ надежности, отказоустойчивости и др.
## На высочайшем уровне проектирования электроники
В рамках высочайшего уровня проектирования электроники отличие от третьего уровня заключается в применении систем Enterprise на каждом этапе.
## Используемые системы
- ECAD: Siemens Xpedition, Cadence Allegro
- PLM: Teamcenter, Windchill
- MCAD: NX, Creo
Такие системы предназначены для высокотехнологичных устройств:
- Печатные платы на 20 слоев
- Тысячи компонентов
- 300+ листов принципиальной схемы
- Сложнейшие правила проектирования
- Сотни дифференциальных пар
ECAD-системы среднего и начального уровня с такими задачами не справятся.
## Методы работы
При разработке таких устройств часто применяют методы одновременной работы нескольких инженеров с одной принципиальной схемой и печатной платой для ускорения процесса.
## Последствия задержки
Сроки на разработку в этом секторе строго регламентированы, и задержка может привести к упущенной прибыли.
## Анализ и симуляция
Цена ошибки на каждом этапе высока, поэтому проводится полный анализ цифровой модели устройства и симуляция работы в реальных условиях.
## Создание цифрового двойника
Иногда используются методы создания цифрового двойника производственной площадки для изготовления изделий.
## Сводка по всем уровням
Примерная таблица всех уровней выглядит так:
| ECAD | PLM | MCAD |
|----------------|--------------|---------------|
| Sprint Layout, Kicad | - | PADS Pro, Altium Designer, Cadence Orcad |
| - | Appius PLM Лоцман | Solidworks, NX, Creo |
| Siemens Xpedition, Cadence Allegro | PTC Windchill, Teamcenter | - |
## Почему именно такая комбинация?
- Выбор систем зависит от сложности проектируемых изделий.
- Существуют нейтральные форматы обмена данных и конвертеры между системами.
- Выбор систем осуществляется с учетом совместимости и функциональности.
Анализ систем ECAD, PLM и MCAD в России
ECAD
В качестве ECAD выступает Altium Designer как наиболее популярная система в среднем сегменте. У многих предприятий накоплен большой задел проектов и большой опыт работы в ней. К тому же, Altium-комьюнити в России наиболее активное, поэтому описать, как можно работать в этой системе, применяя новейшие подходы и технологии, будет очень полезно.
Историческая ретроспектива развития мировых ECAD систем
Разделение всех мировых ECAD-систем по уровням сложности позволяет ориентироваться и описывать уровень высокой третьей степени систематизации. Рекомендовать всем предприятиям Enterprise-уровень нецелесообразно, поскольку далеко не все выпускают высокотехнологичные изделия.
Altium Designer исторически занимает лидирующее место по использованию на предприятиях в России. Компания Altium проводила регулярные вебинары, обучение и другие активности в стране, что способствовало её популяризации. Для Altium Designer создано множество различных дополнений, интеграций и скриптов, которые помогают инженерам в их привычной работе.
PLM
В качестве PLM- и MCAD-систем мы будем использовать продукты компании Siemens. Siemens Teamcenter PLM ― одна из систем для обеспечения полного сквозного проектирования изделий. По полноте функционала и интеграциям с различными ECAD и MCAD эта система находится на лидирующих позициях.
Источник Управление жизненным циклом продукта для отдельных производителей
PLM-системы долгое время применялись для крупного машиностроения, и поддержка разработки электроники для них не являлась приоритетной задачей, поэтому она возникла относительно недавно. Появились специальные объекты внутри системы для управления проектами печатных плат, разработан специальный модуль Teamcenter Electronic Design Automation (EDA), который обеспечивает связь между Teamcenter и множеством ECAD-систем, включая Altium Designer.
MCAD
В качестве MCAD рассмотрим Siemens NX. Это CAD/CAM/CAE-система высочайшего класса, которая нативно поддерживается Teamcenter PLM. В ней работают множество компаний, например, Boeing, Bosch и команда F1 Red Bull Racing.
Для электроники в NX имеется специальный модуль PCB Exchange, который позволяет работать с 3D-моделями печатных плат и их компонентами.
Почему не используем EDM?
Источник Функциональная схема взаимодействия разработчиков на основе разделения ролей в системе Altium NEXUS
Но если на предприятии подразумевается использование полноценной PLM, то все эти плюсы превращаются в проблемы.
На данный момент функционала ECAD Data Management-систем полностью хватает, чтобы проектировать электронику в закрытом контуре (от полностью сквозного проектирования (идеи и планирования) до производства (сборки и поставки готовых изделий)). Мы же ориентируемся на систему, которая позволяет встроить процесс разработки плат в единый маршрут создания устройств.
Так как же правильно разрабатывать электронику?
Точкой старта является PLM-система, в которой планируется разработка изделия с конкретными характеристиками и требованиями. Все сотрудники предприятия имеют свои учетные записи в системе Teamcenter, и за каждым закреплены определенные роли в соответствии с их должностными обязанностями. При проектировании электронной составляющей изделия сначала определяют конкретные требования к системе, разрабатывают структурную и функциональную схемы изделия, затем принципиальную схему всего устройства и доходят до уровня разработки печатных плат, где уже и будет вступать в работу ECAD.
В этом процессе могут участвовать различные отделы ― схемотехнический, конструкторский, отдел инженерных расчетов, технологический, производственный и т.д. Задания на разработку создаются и отслеживаются в Teamcenter. Все промежуточные этапы разработки также фиксируются и сохраняются в PLM. Окончательно разработанные устройства согласовываются, подписываются и утверждаются тоже в единой системе.
Кратко процесс разработки печатной платы можно описать так:
Такой процесс не является линейным. Некоторые этапы могут идти параллельно: часто необходимо внести изменения в схему во время проектирования платы либо в топологию при вставке модели платы в сборку изделия. Взаимные переходы от одного процесса к другому являются важными для скорости и эффективности разработки. Все изменения схемы должны автоматически появляться у конструктора платы, все изменения конструкции платы должны появляться у конструктора прибора, и руководители должны видеть весь прогресс проектирования изделия в реальном времени на любом этапе. Этим и отличается сквозной прослеживаемый маршрут проектирования без разрывов в данных, ручных бумажных документов, очных заданий и поручений.
База элементов
У Altium Designer есть множество способов работы с библиотеками элементов. Обычные файловые библиотеки и интегрированные не подходят для системного подхода ― для внесения новых атрибутов или элементов необходимо будет добавлять новые или вносить изменения в имеющиеся библиотеки. Эту проблему решает база элементов с подключением к СУБД.
Altium Designer можно подключить и Excel/Access-базе, но в разрезе взаимодействия с PLM-системой это приведёт к необходимости постоянной синхронизации баз. Тем более, что есть проблемы с таблицами от Microsoft с одновременными внесениями изменений, с разграничением доступа и подключением к базе из различных версий 32/64 битных Altium Designer и XLSX/ACCDB.
Поэтому лучшим вариантом для ECAD-системы будет подключение напрямую к базе элементов в PLM-системе. В Teamcenter для этого есть модуль «Классификатор», тем самым мы имеем непосредственное отображение элементов PLM-системы в Altium Designer, включая все атрибуты и библиотеки:
Отображение связи по ID между элементом в Altium Designer и Teamcenter PLM
Любое изменение в Teamcenter, внесение нового элемента или изменение и добавление параметров автоматически будут отображены в Altium Designer без необходимости какой-либо синхронизации баз данных.
Применение единой базы элементов на всём предприятии является основой для сквозного маршрута проектирования, в том числе и для электроники. Радиоэлектронный элемент в единой базе — это целая система объектов, параметров, библиотек и 3D-моделей. В классическом понимании ― это не только строчка в базе данных, но еще и множество объектов, подключенных к этому элементу в PLM-системе:
Структура библиотечного радиоэлемента в PLM системе
В PLM-системе ECAD-компонент — это целая система объектов и отношений:
Библиотечная 3D-модель транзистора с дополнительными механическими деталями
Работа с проектами плат
Для интеграции ECAD Altium Designer с Teamcenter PLM компанией XPLM разработан специальный модуль EDA Connector, который встраивается в интерфейс Altium и позволяет открывать проекты, сохранять и даже отправлять их на согласование.
Интерфейс Siemens EDA в Altium Designer
При сохранении проекта в PLM происходит его компиляция и проверка по определенным правилам, например, на использование только библиотечных PLM-компонентов. При этом в Teamcenter создается полный набор данных проекта, объект схемы и печатной платы со всеми необходимыми отношениями. Файл проекта и все листы схемы попадают в набор данных к схеме, файл печатной платы pcbdoc ― в набор данных к объекту печатной платы. При этом имеется полная поддержка как иерархических проектов, так и проектов с вариантами, которые в PLM будут сохранены как полноценные отдельные исполнения платы.
Структура объекта проекта печатной платы в Teamcenter
Одновременно с сохранением всего проекта создается и полная электронная структура, состоящая из всех элементов принципиальной схемы. В ней компоненты являются библиотечными PLM-объектами со всеми их отношениями, библиотеками, 3D-моделями и параметрами. Из такой структуры можно создать и технологический состав с распределением по цехозаходам, и перечень комплектации для заказа комплектующих, а также сформировать конструкторскую документацию, например, перечень элементов.
Электронная структура проекта печатной платы в Teamcenter
Интеграция ECAD-MCAD
Модель платы из Altium Designer можно выгрузить в нейтральных форматах STEP/Parasolid и потерять при этом связь с проектом, получить полностью нейтральные элементы в MCAD без всякого соотношения с PLM-системой, без свойств элементов и материалов. К тому же, при этом не будет никакой информации о стеке печатной платы, зонах запрета размещения, гибких частях печатной платы и т. д.
Для обмена данными между ECAD и MCAD-системами компанией Mentor Graphics был разработан специальный формат IDF, который впоследствии был модернизирован в формат IDX, который уже поддерживает двусторонний обмен данными. Формат IDX имеет три типа файлов:
Altium Designer поддерживает формат IDX2.0, который создаётся через плагин MCAD IDX Exchange. Его можно установить через меню Extensions & Updates. Если сильно упрощать, он не содержит в себе самих моделей из Altium Designer, а только имя посадочного места, ID компонента и координаты элемента на плате:
При загрузке файла IDX в систему NX с помощью модуля PCB Exchange создаётся полная сборка платы. Все элементы являются нативными моделями NX и PLM объектами со всеми связями, атрибутами, применимостью и материалами.
3D-модель платы в NX, полученная после загрузки ECAD Baseline.idx
При использовании формата IDX между Altium Designer и NX доступен двусторонний обмен изменениями. После их внесения в печатной плате формируют файл changes.idx, который можно загрузить в NX и без переформирования сборки произвести все изменения, сохранив связи и применяемости 3D-сборки. Также работает и в обратную сторону: NX может сформировать инкремент изменений, после загрузки которого в Altium Designer можно получить все предложенные изменения со стороны MCAD.
Визуализация изменений, пришедших со стороны MCAD в Altium Designer
Резюме
Использование PLM-системы при разработке электроники позволяет встроить отделы, занимающиеся проектированием принципиальных схем и печатных плат, в единый сквозной маршрут с полноценным обменом данных между сотрудниками. Сохранение проектов печатных плат в PLM-системе и получение электронных составов является основой для последующих работ конструкторов изделий, технологов, отдела инженерных расчетов, службы снабжения и других.
Перспективы внедрения PLM-технологий при разработке электроники
Имея полноценные модели платы в MCAD и PLM-системах, можно проектировать электрические кабельные системы, объединяя несколько плат между собой и подключая их к другим элементам устройства. Выполнять сложные инженерные, тепловые и механические расчеты, расчеты надежности. Данные сохраненных проектов можно применять для автоматизированных рабочих мест на производстве и непосредственного отображения информации о плате на экране мониторов. В перспективе проект и модель платы должны являться электронным подлинником, из которого в любой момент времени можно сформировать нужные текстовые документы.
Благодарю, что дочитали статью до конца. Мы, специалисты департамента цифровой трансформации машиностроения ЛАНИТ, будем рады услышать ваше мнение в комментариях.
Полезные ссылки
Библиотеки элементов для Altium Designer:
Скрипты и плагины для Altium Designer:
Быстрый старт с Altium Designer
Бесплатный Altium Viewer
Время на прочтение
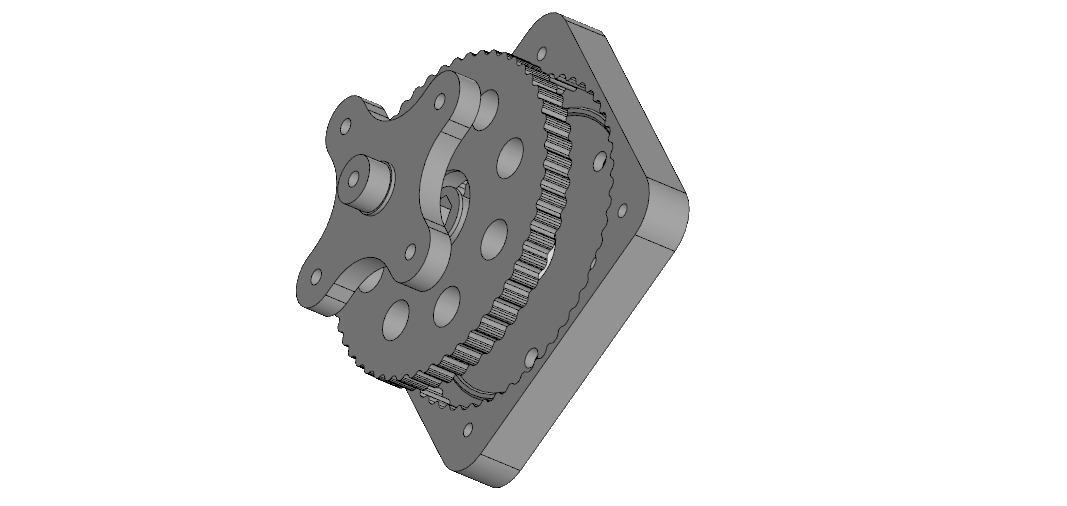
Всем привет! Эта статья открывает собой серию статей по разработке манипулятора. Тут я попробую рассказать о циклоидном редукторе и зачем он вообще мне понадобился. Разумеется, мы проведём его расчёт и воплотим его в физическое представление при помощи PLA пластика. Ну и как бонус соберём из хлама BLDC мотор для тестирования этого редуктора. Погнали.
Появилась идея собрать манипулятор. Я пока не определился с областью его применения. Будет ли это рука или какой-то захват, но есть одно требование — он должен быть точным, без люфтов, дрожаний и прочих радостей.
Для построения такого механизма обычные сервоприводы не пойдут. Под нагрузкой они имеют свойство терять в точности и имеют люфты из-за многоступенчатого редуктора. Тут мне на глаза попался циклоидный редуктор:
Он имеет довольно интересные свойства:
Я решил попробовать его собрать и посмотреть его в деле. Давайте окунёмся в расчёты этого зверя и посмотрим, что получится при печати его на 3D принтере.
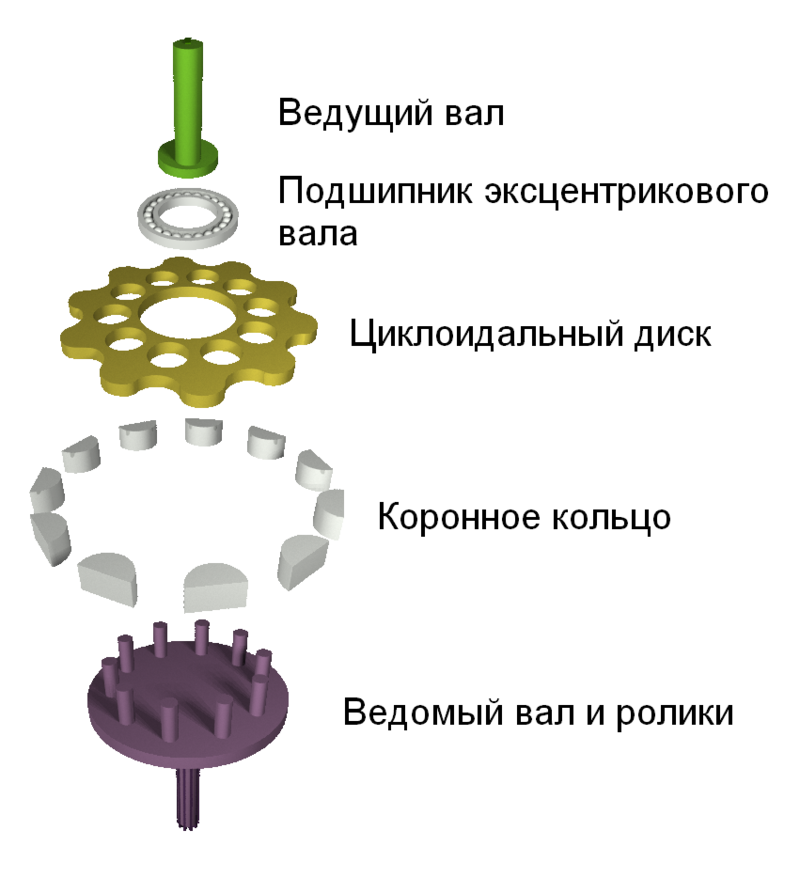
Подходов к расчётам много и каждый кусок приходилось искать отдельно. Я постарался собрать наиболее простой в одном месте не только для вас, но и для себя. Вот основные детали, которые нам нужно будет рассчитать и изготовить:
▍ Расчёт параметров коронного кольца
Начнём с выбора передаточного отношения, ну пусть будет 50. В результате мы получим снижение оборотов ведомого вала в 50 раз относительного ведущего, но получим увеличение в 50 раз крутящего момента. Из значения передаточного отношения можно получить количество зубьев коронного кольца и циклоидального диска:
где n — количество зубьев циклоидального диска, N — количество зубьев коронного кольца. При этом должно соблюдаться условие:
Подставив формулу (1.2) в формулу (1.1) мы сможем получить количество зубьев циклоидального диска:
Получается, что отношение задаётся только количеством зубьев циклоидального диска. Всё очень просто. Для нашего случая n = 50, а по формуле 1.2 мы получаем N = 51.
Далее нам нужно выбрать диаметр коронного кольца. Центры зубьев располагаются на его окружности, соответственно, от него будет зависеть диаметр зубьев (2.1), а у нас их целых 51. Тут можно считать в обе стороны: либо мы выбираем диаметр коронного кольца и считаем диаметр зубьев (2.1), либо, наоборот — относительно диаметра зубьев вычисляем диаметр коронного кольца (2.2).

Я выбрал путь 2.2 и взял для расчёта диаметр зубьев 2.5 мм. Мой принтер без проблем осилит такие зубья с высокой точностью.
Ведущий вал редуктора вращается с небольшим смещением от оси вращения двигателя, это смещение называется эксцентриситет. Его значение вычисляется по формуле ниже (3.1):
▍ Расчёт и построение циклоидального диска
Тут мы внезапно переходим к построению циклоидального диска! Это нормально, хотя мы расчёты мы вели для коронного кольца, они нам ещё нужны :). Форма его зубьев представляет собой эпитрохоиду. Как она строится, показано ниже:
Рассчитаем диаметр окружности, при помощи которой мы будем строить эпитрохоиду (4.2). Далее я её буду называть ОЭО — описывающая эпитрохоиду окружность (чёрная на анимации). И диаметр окружности, по которой будем катать ОЭО (4.1). Далее её я буду называть ОЭ — окружность эпитрохоиды.
Нам нужно параметрическое уравнение эпитрохоиды. Выглядит оно следующим образом (4.3), (4.4).
Теперь мы можем приступить к построению эпитрохоиды. Делать это мы будем при помощи параметрического уравнения и соответствующей функцией CAD (спасибо 21 век). Для проектирования я использую КОМПАС 3D, там есть функция «Кривая по закону» в разделе «Каркас и поверхности».
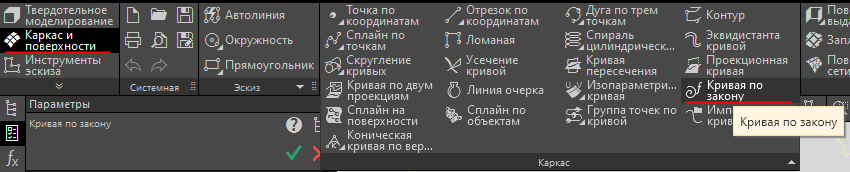
Меню «Каркас и поверхности»
В открывшемся окне можно указать уравнения для X, Y, Z. Очень важно все расчёты проводить без округления, т. к. выражение внутри второго cossin имеет огромное влияние на построение. Малейшие отклонения даже в тысячных приведут к тому, что конец кривой в итоге не сойдётся с её началом. Получились такие страшные уравнения:
Но в итоге получаем красивую кривую. Всё же математика не перестаёт удивлять 🙂

Эпитрохоида циклоидального диска
Но это ещё не всё. Теперь нам нужно построить эквидистанту этой кривой на расстояние половины диаметра зуба коронного кольца (Dзкк), который мы выбрали ранее (2.5 мм). Направление построения внутрь кривой.
В КОМПАС 3D для этого нужно спроецировать эту кривую на плоскость, т. к. она изначально строится в трёхмерном пространстве, потом построить эквидистанту проекции на расстоянии -1.25 мм и спроецировать эквидистанту на эскиз. Немного сложно, но другого способа я не нашёл, возможно, можно проще.
В итоге мы получаем эскиз, в котором мы можем делать с этой кривой всё что угодно. И первым делом мы преобразовываем её в сплайн вот с такими параметрами (картинка ниже). С другими параметрами получаются странные артефакты.
Без преобразования в сплайн при копировании кривой и последующей её вставки в другую деталь, кривая изменяет свою форму (наверное бага). И программа почему-то очень долго обрабатывает операцию выдавливания для исходной кривой. Сплайн решает эти проблемы.
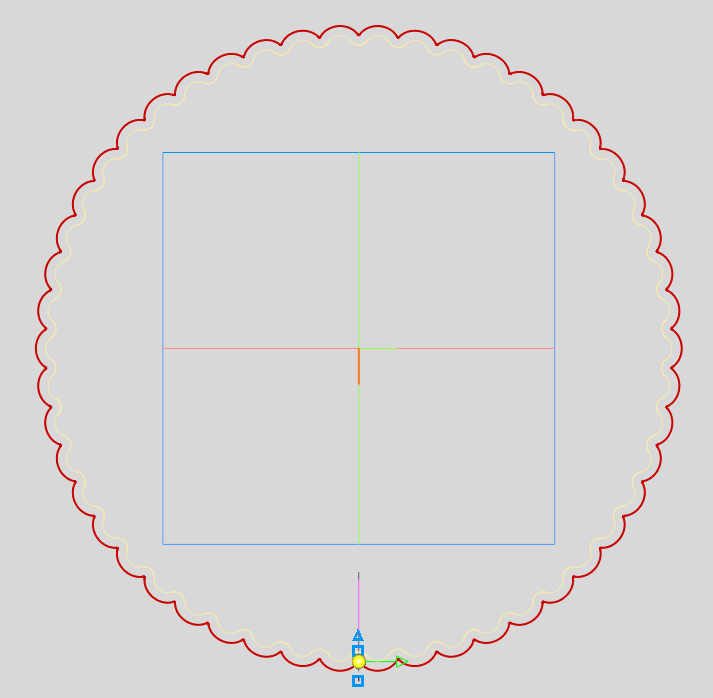
В результате мы получаем форму циклоидального диска (бежевая линия на картинке).
Не забываем добавить посадочные места под подшипники входного вала с эксцентриком и ролики выходного вала. Размеры посадочных мест выбираются исходя из требуемых типов подшипников (в моём случае это те, что есть в коробке). Выдавливаем всё это дело и получаем такое красивое колесо. Центральный подшипник я взял размером 24х12х6, а подшипники под выходной вал размером 10x5x4.

▍ Построение коронного кольца
Давайте теперь построим коронное кольцо. Лучше всего это делать после построения циклоидального диска, т. к. на этом этапе можно проверить правильность расчётов. Строим окружность диаметром
и располагаем на нём N = 51 окружность диаметром

Эскиз коронного кольца
Теперь мы берём контур нашего циклоидального диска и его центр располагаем на расстоянии эксцентриситета от центра коронного кольца.

Вот тут можно и проверить правильность расчётов. Зубья циклоидального диска не залезают за контур будущих зубьев коронного кольца — мы сделали всё правильно и механизм будет работать. Дальше есть 2 пути: мы оставляем зубья коронного кольца в виде окружностей или делаем из них что-то вроде зубчатого колеса. Я выбрал второй вариант и при помощи скругления между окружностями соединил зубья в единую сущность.
Можно в качестве зубьев использовать головки болтов ИМБУС, но зубьев довольно много и я решил, что лучше и быстрее будет их напечатать.
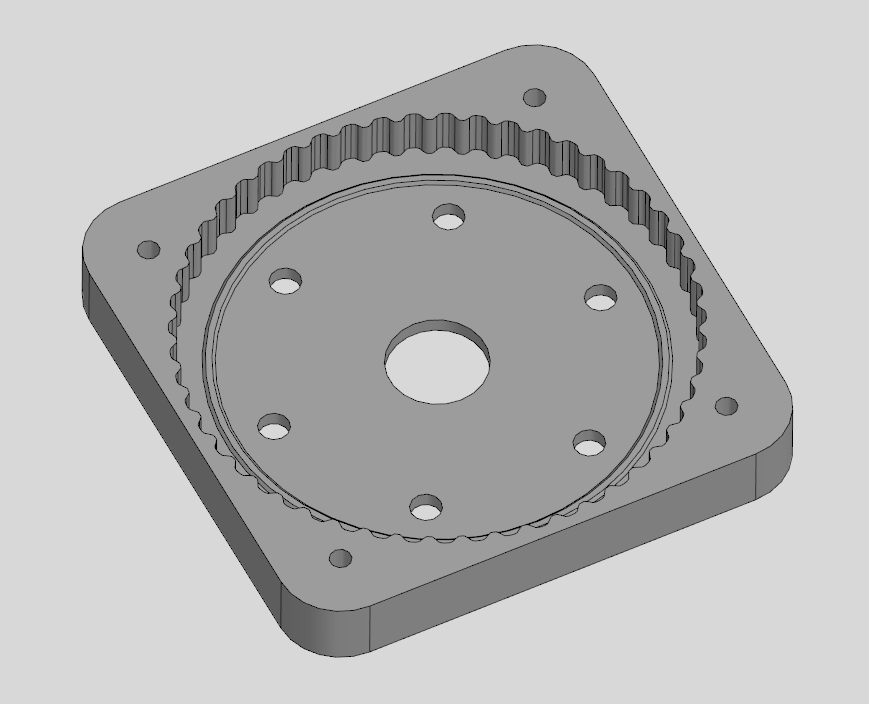
Модель коронного кольца
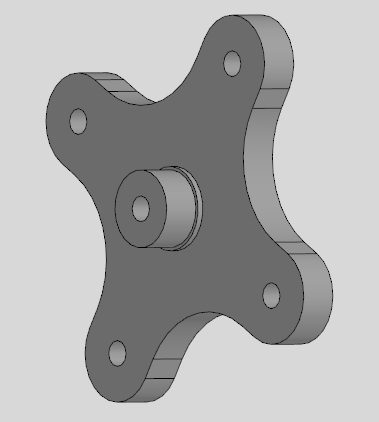
▍ Расчёт и построение выходного вала и эксцентрика
Ну вот мы подобрались к последним элементам редуктора — выходному валу и эксцентрику. Давайте начнём с эксцентрика, т. к. это самая простая деталь. Он должен насаживаться на вал двигателя и иметь смещение от центра его вращения, мы его вычисляли по формуле (3.1). Всё просто.

Получилась очень простая деталь, которая запрессовывается в центральный подшипник циклоидального диска.

А вот выходной вал придётся немного посчитать. У него имеются штифты, которые взаимодействуют с циклоидальным диском и преобразуют его несоосное движение в соосное относительно оси вращения двигателя. Диаметр штифтов вычисляется следующим образом:
— диаметр отверстия под штифт на циклоидальном диске. В нашем случае это внутренний диаметр подшипника 5 мм,
— значение эксцентриситета.
Количество штифтов определяется нагрузкой на выходной вал. Чем выше нагрузка, тем больше штифтов понадобится. Во время работы редуктора штифты работают на излом, т. к. сила прикладывается к ним перпендикулярно к их оси, соответственно, они должны иметь большую прочность. Пластик тут нам не может.
В качестве штифтов я использовал болты М4, срезал с них головку и слегка сточил резьбу дремелем, чтобы примерно быть рядом с 3.75 мм. Окружность, на которой находятся центры штифтов — должна совпадать с окружностью, на которой находятся центры отверстий под них на циклоидальном диске (где располагаются подшипники).
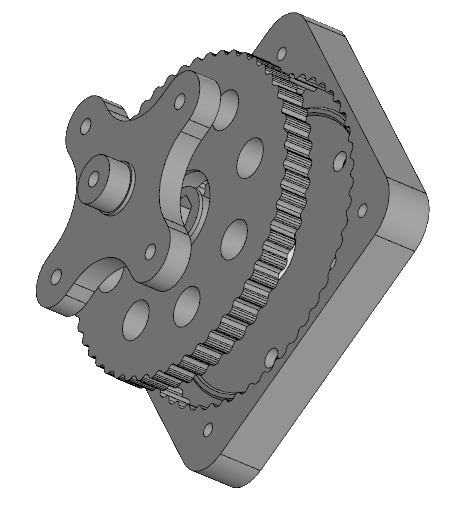
Коронное кольцо, он же корпус с эксцентриком на валу двигателя

Циклоидальный диск с подшипниками

Выходной вал с установленными штифтами
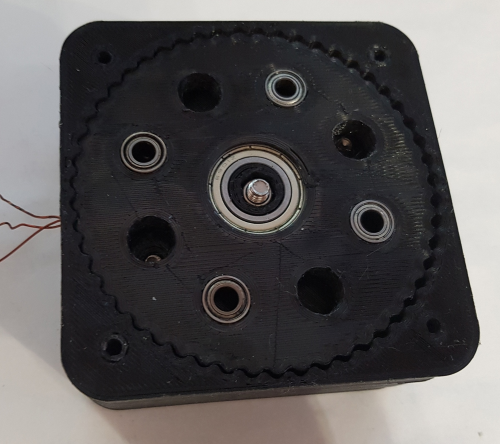
Насаживаем циклоидальный диск на эксцентрик
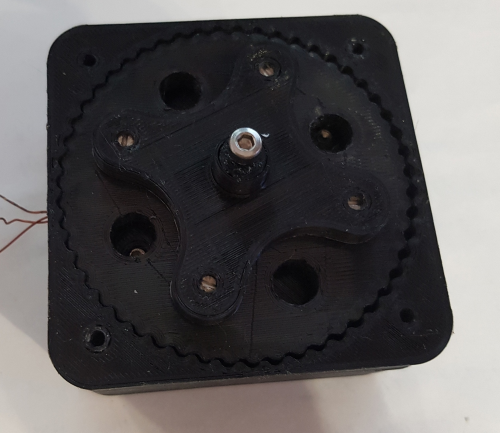
Устанавливаем выходной вал

Закрываем крышкой и фиксируем ось выходного вала подшипником
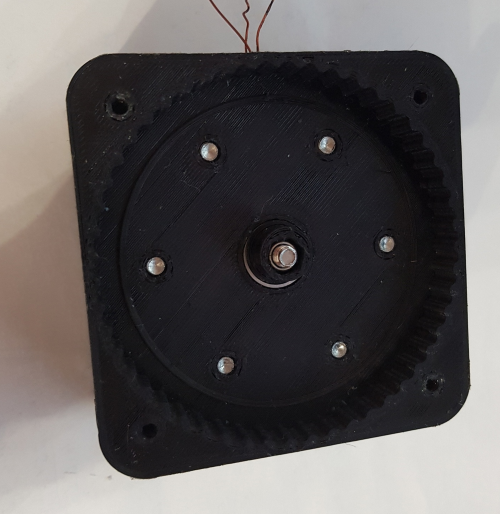
Во время тестов на видео слышны закусывания, это как раз из-за неточности изготовления. Деталь после печати изменяет свои геометрические размеры из-за усадки пластика.
Очень интересный принцип его работы. Получается, что за один оборот двигателя циклоидальный диск делает шаг на один зуб, но тут и кроется его беда. За счёт наличия эксцентрика у этого редуктора большие вибрации на высоких оборотах, что сужает спектр решаемых им задач (спойлер).
После создания редуктора хотелось бы его проверить на высоких оборотах. У меня не нашлось подходящих двигателей для него, и я решил собрать свой. Выбор пал на радиальный бесщёточный мотор из-за его конструкции — он плоский и его удобно состыковать с редуктором.
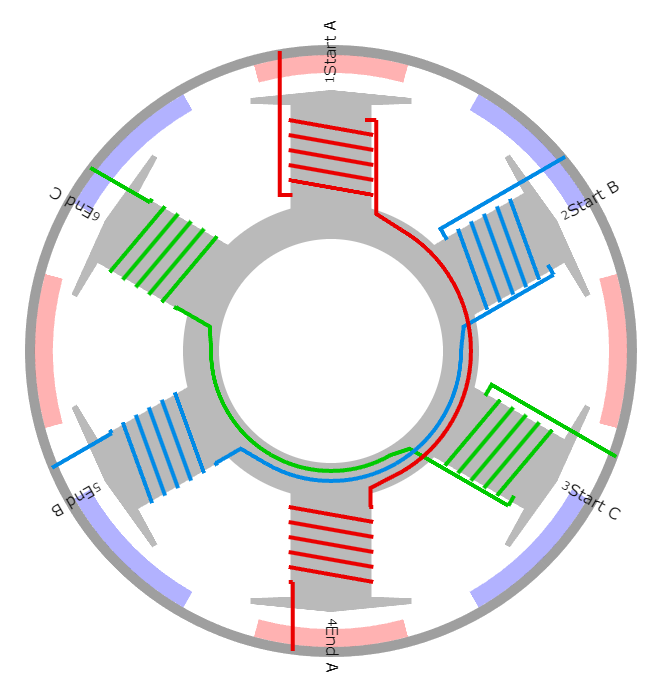
Для его сборки были заказаны неодимовые круглые магниты диаметром 20 мм и толщиной 3 мм, ну и катушка намоточной проволоки диаметром 0.5 мм. Конфигурацию двигателя я выбрал исходя из размеров редуктора, получилось 8 магнитов и 6 катушек.
Собираем ротор. Он представляет собой кусок пластика с посадочными местами под магниты и отверстием под вал. В качестве вала я использовал болт М5. Магниты необходимо проклеивать, так как есть большая вероятность их вылета из посадочных мест. В результате могут повредиться обмотки или можно получить травмы.
Есть важная особенность при проектировании таких моторов — магниты должны быть как можно ближе друг к другу. В идеале это должно быть намагниченное кольцо. В первой итерации я расположил магниты слишком далеко и происходил срыв синхронизации, мотор просто не работал.

Ротор с магнитами
Ну теперь самое весёлое — намотка катушек. У меня получилось 7 слоёв по 8 витков, суммарно 56 (в среднем, т. к. есть небольшие отклонения в 1-2 витка). Каждый слой я покрывал лаком для прочности обмотки, так как её без проблем может размотать магнитным полем. Изначально я хотел 9 катушек, но терпения у меня хватило только на 6. Блок питания у меня слабоват и не вытягивает токи больше 2 А, поэтому обмотки соединены звездой для снижения пусковых токов и плавности хода.

Закидываем обмотки в статор, фиксируем пайку термоклеем, выводим провода от обмоток для подключения регулятора и запрессовываем два подшипника по пути.

Статор с обмотками
Пришло время накинуть ротор. Он немного выступает из корпуса — это нормально, сверху ещё будет защитный кожух. Мотор развивает очень большие обороты и довольно страшно держать его в руках, когда есть риск разрушения всей этой конструкции. Расстояние между катушками и магнитами около 1.5 мм, что довольно много, но для MVP вполне сойдёт. Пластик — это не тот материал, из которого нужно изготавливать моторы, так как сказывается его мягкость.

Двигатель в сборе
Во время первых тестов было весело. «А давай попробуем на максимальные обороты его вывести», подумал я:

Плохо промазал верхние слои и в результате витки приподняло магнитным полем, ну а дальше и так понятно. Было страшно. Но ничего, перематываем 2 обмотки, промазываем, меняем их и погнали дальше.
Ну и, конечно же, результат. Ток холостого хода составил 270 мА, рукой остановить очень сложно. Учитывая, что тут статор собран без использования металла, результат очень хорош, по крайней мере, я доволен. На видео всего 30% мощности, т. к. без кожуха я не рискнул его разгонять на 100%.
▍ Результаты и заключение
На видео видно, что при высоких оборотах наблюдается сильная вибрация. Также слышен сильный шум во время работы редуктора, вызванный неточностью изготовления штифтов выходного вала. В результате этого во время работы штифты начинают биться о подшипники, а должны были скользить по ним.
Какие выводы из всего этого можно сделать?
В целом, для решения моих задач его возможностей достаточно. Попробуем его в реальном проекте. В следующей статье попробуем собрать сервопривод на основе циклоидального редуктора и шагового двигателя. Надеюсь, было интересно. Спасибо за внимание!

Этот датчик представляет собой несущую/коммутационную плату для лазерного датчика расстояния ST VL53L7CX, который обеспечивает быстрое и точное измерение действия на расстоянии до 3.5 м через цифровой интерфейс I²C. Он имеет очень широкое квадратное поле зрения (FOV) 60°×60° (диагональ 90°) и может измерять абсолютные расстояния до нескольких целей одновременно в нескольких зонах, предоставляя достаточно данных для построения карты глубины с разрешением до 8×8. Плата включает в себя линейный стабилизатор на 3.3 В и преобразователи уровня, которые позволяют ей работать в диапазоне входного напряжения от 2.5 В до 5.5 В, а расстояние между контактами 2,54 мм упрощает использование со стандартными беспаечными макетными и перфорированными платами с шагом отверстий 2.54 мм. Примечание: этот модуль не рекомендуется для использования с 8-битными микроконтроллерами — для таких приложений рассмотрите несущую панель VL53L1X , VL53L0X или VL6180X.
Код производителя: 3418
VL53L7CX от ST Microelectronics — это времяпролетный датчик дальнего действия (TOF), встроенный в компактный модуль. Эта плата является платформой для VL53L7CX, поэтому рекомендуется внимательно прочитать техническое описание VL53L7CX перед использованием этого продукта.
VL53L7CX фактически представляет собой крошечную автономную лидарную систему со встроенным лазером класса 1 с длиной волны 940 нм, который невидим и безопасен для глаз. В отличие от обычных ИК-датчиков, которые используют интенсивность отраженного света для оценки расстояния до объекта, VL53L7CX использует технологию ST FlightSense для точного измерения того, сколько времени требуется излучаемым импульсам инфракрасного лазерного света, чтобы достичь объектов и отразиться обратно на детектор. Этот подход обеспечивает абсолютные измерения расстояния независимо от условий окружающего освещения и характеристик цели (например, цвета, формы, текстуры и отражательной способности), хотя эти внешние условия влияют на максимальную дальность действия датчика.
VL53L7CX отличается от предыдущих времяпролетных датчиков ST сверхшироким квадратным полем зрения (FOV) 60×60°, что обеспечивает угол обзора 90° по диагонали, а также выходным сигналом многозонного дальномера. Его поле зрения разделено на несколько зон, настраиваемых в виде сетки 4×4 или 8×8, а датчик предоставляет отдельные показания для каждой зоны (которая может включать несколько целей в каждой зоне). Это фактически делает VL53L7CX базовым 3D-лидаром, поскольку вместо измерения только одного расстояния (1D-лидар) он может предоставить достаточно данных для создания карты глубины окружающей среды с низким разрешением в поле его зрения. На следующем изображении показан пример такой карты, созданной с помощью VL53L5CX, которая очень похожа на VL53L7CX:
При благоприятных условиях датчик может сообщать о расстояниях до 3.5 м с разрешением 1 мм. Минимальное расстояние измерения составляет 20 мм. Измерения дальности доступны через интерфейс I²C (TWI) датчика, который также используется для настройки параметров датчика, а датчик имеет три дополнительных контакта: выход прерывания и два входа для отключения и сброса интерфейса I²C.
VL53L7CX — отличная микросхема, но ее небольшой корпус LGA без выводов затрудняет ее использование обычным студентом или любителем. Он также работает при рекомендуемом напряжении от 2.8 В до 3.3 В, что может затруднить взаимодействие микроконтроллеров, работающих при напряжении 5 В. Предлагаемая коммутационная плата решает эти проблемы, упрощая начало использования датчика, сохраняя при этом общий размер небольшим, насколько это возможно.
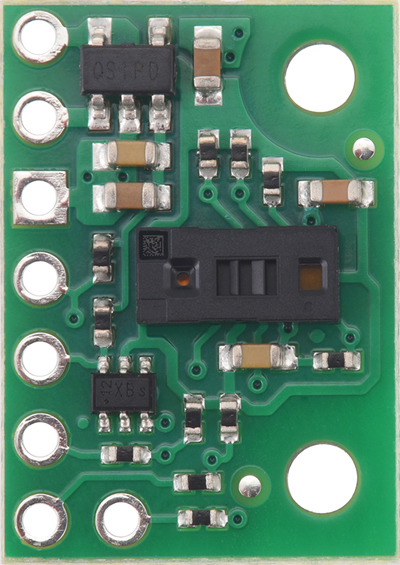
Несущая плата включает в себя линейный стабилизатор напряжения с низким падением напряжения, который обеспечивает напряжение 3.3 В, необходимое для VL53L7CX, и позволяет питать датчик от источника питания от 2.5 В до 5.5 В. Выход регулятора доступен на выводе VDD и может подавать ток около 100 мА на внешние устройства. Коммутационная плата также включает в себя схему, которая переводит тактовый сигнал I²C и линии данных на тот же уровень логического напряжения, что и поставляемый VIN, что упрощает взаимодействие платы с системами 5 В, а расстояние между контактами платы 2.54 мм упрощает ее использование. со стандартными беспаечными макетами и перфорированными платами с шагом 2.54 мм. Плата поставляется полностью укомплектованной компонентами SMD, включая VL53L7CX, как показано на изображении продукта.
Входящие в комплект компоненты:
В комплект входят полоса контактов 1×8 с шагом 2.54 мм и полоска контактов с шагом 2.54 мм 1×7, как показано на рисунке ниже. Вы можете припаять выбранную вами полоску контактов к плате для использования с нестандартными кабелями или беспаечными макетами или припаять провода непосредственно к самой плате для более компактной установки.
На плате есть два монтажных отверстия, расположенных на расстоянии 12.7 мм друг от друга, которые подходят для винтов № 2 и M2 (не входят в комплект).
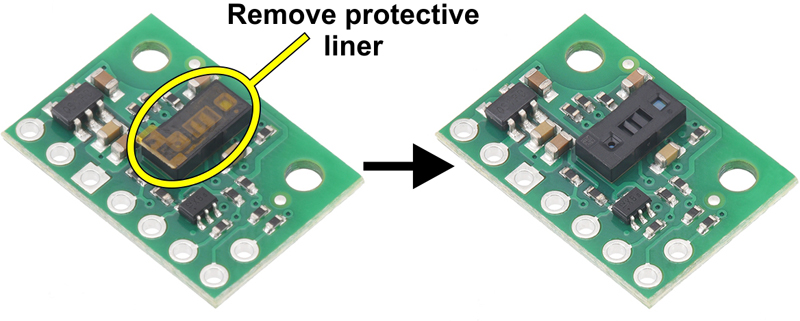
Этот датчик может поставляться с защитным чехлом, закрывающим микросхему датчика.Подкладку надо снять для правильного восприятия.
Для использования платы VL53L7CX необходимы как минимум четыре соединения: VIN, GND, SCL и SDA. Вывод VIN должен быть подключен к источнику напряжения от 3.3 до 5.5 В, а GND должен быть подключен к источнику 0 В. Встроенный линейный стабилизатор напряжения преобразует VIN в напряжение 3.3 В, доступ к которому можно получить через вывод VDD для микросхемы VL53L7CX. Напряжение питания от 2.5 В до 3.6 В также можно подключить к VDD (при отключенном VIN), чтобы обойти стабилизатор и подать питание на плату напрямую.
Выводы I²C, SCL и SDA, подключены к встроенным преобразователям уровня, что делает их безопасным для использования при напряжениях выше VDD — они должны быть подключены к шине I²C, работающей на том же логическом уровне, что и VIN (или VDD, если питание платы осуществляется через VDD).
Выводы LPn и I2C_RST являются входами, а вывод INT — выходом с открытым стоком. Плата LPn и INT подтягиваются к VDD, а I2C_RST – к GND. Эти три контакта не подключены к переключателям уровня на плате и не устойчивы к напряжению 5 В, но LPn и INT можно использовать как есть с микроконтроллерами 5 В: микроконтроллер может считывать выходной сигнал INT до тех пор, пока его верхний логический порог ниже VDD, и микроконтроллер может чередовать свой собственный выход между низким и высоким импедансом. состояния для управления выводом LPn. Альтернативно, 4-канальный двунаправленный преобразователь логического уровня может использоваться внешне с этими выводами.
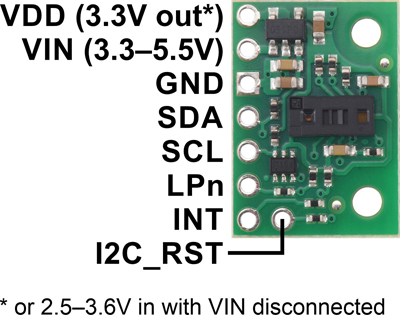
Обозначение вывода Описание вывода
VDD Выход стабилизатора напряжения 3.3 В для питания внешних компонентов. Доступно около 100 мА. (Если вы хотите обойти внутренний регулятор, вы можете вместо этого использовать этот контакт в качестве входа для напряжений от 2.5 В до 3.6 В с отключенным VIN.)
VIN Это основное соединение источника питания от 3.3 В до 5.5 В. Преобразователи уровня SCL и SDA поднимают линии I²C до этого уровня напряжения.
GND Заземление (0 В) вашего источника питания. Ваш источник управления I²C также должен иметь общую землю с этой платой.
SDA Линия данных I²C со смещенным уровнем: HIGH — это VIN, LOW — 0 В.
SCL Линия синхронизации I²C со сдвигом уровня: HIGH — это VIN, LOW — 0 В
LPn Этот вывод представляет собой вход отключения интерфейса I²C с активным низким уровнем; плата подтягивает его к VDD, чтобы по умолчанию включить связь I²C. Установка низкого уровня на этом выводе отключает связь I²C (обычно используется как часть процесса изменения адресов I²C). Этот вход не сдвигается по уровню.
INT Программируемый выход прерывания (логический уровень VDD). Этот выходной сигнал не сдвигается по уровню.
I2C_RST Этот вывод представляет собой вход сброса I²C с активным высоким уровнем; по умолчанию плата подтягивает его к GND. Установка высокого уровня на этом выводе сбрасывает интерфейс I²C (но не весь датчик). Этот вход не сдвигается по уровню.
Принципиальная электрическая схема:
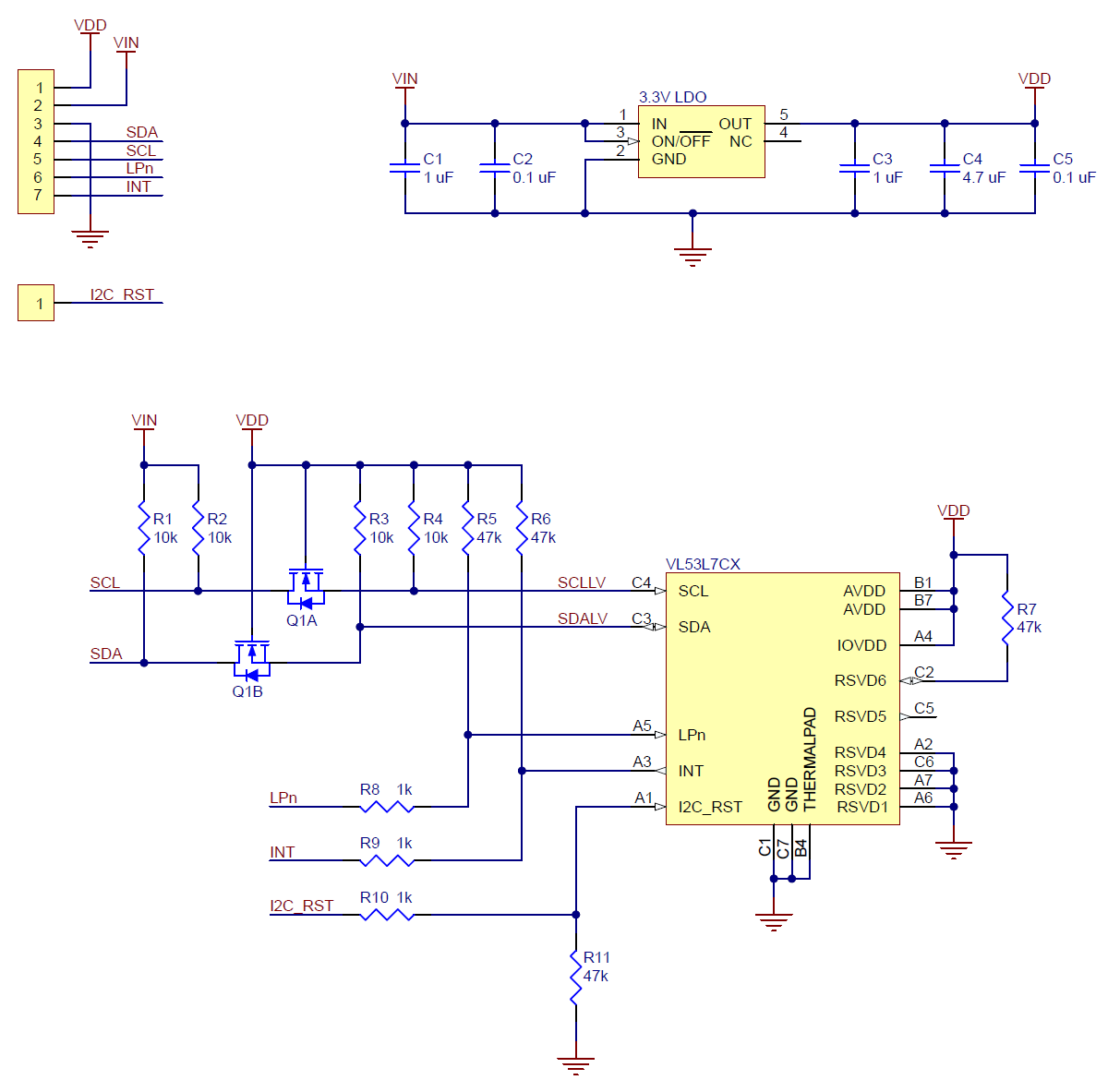
На приведенной выше схеме показаны дополнительные компоненты, которые включает в себя несущая плата для упрощения использования VL53L7CX, включая стабилизатор напряжения, который позволяет питать плату от источника питания от 2.5 В до 5.5 В и схему сдвига уровня, которая обеспечивает связь I²C на тот же уровень логического напряжения, что и напряжение на входе VIN.
При включении питания 7-битный целевой адрес датчика по умолчанию равен 0101001b. Его можно изменить на другое значение, записав один из регистров конфигурации устройства, но новый адрес применяется только до тех пор, пока датчик не будет сброшен или выключен. В документе ST UM3038 описывается, как использовать несколько датчиков VL53L7CX на одной шине I²C, индивидуально включив связь I²C на каждом датчике с помощью его контакта LPn и назначив ему уникальный адрес.
Интерфейс I²C на VL53L7CX соответствует стандарту быстрого режима I²C (400 кГц).
Конфигурация и управление датчиком:
В отличие от информации, доступной для многих других устройств, ST не опубликовала публично карту регистров, описания или другую документацию по настройке и управлению VL53L7CX. Вместо этого предполагается, что связь с датчиком будет осуществляться через ST VL53L7CX ULD API (STSW-IMG036), набор функций C, которые заботятся о низкоуровневом интерфейсе. Чтобы использовать VL53L7CX, вы можете настроить API для работы на выбранной вами хост-платформе, используя информацию в документации API. Альтернативно можно использовать исходный код API в качестве руководства для собственной реализации.
API VL53L7CX функционально идентичен API VL53L5CX, поэтому, если вы хотите использовать VL53L7CX с Arduino-совместимым контроллером, вы можете попробовать библиотеку SparkFun VL53L5CX Arduino, порт API ST, который работает с платформой Arduino. Чтобы установить его, найдите «SparkFun VL53L5CX» в диспетчере библиотек Arduino. ( Примечание: 8-битные микроконтроллеры, включая Arduino Uno, обычно не имеют достаточного количества оперативной или программной памяти для использования с VL53L7CX, поэтому эта библиотека в основном полезна для более мощных микроконтроллеров, таких как 32-битный RP2040 или ESP32.)
Семейство модулей держателей Pololu для времяпролетных датчиков расстояния ST:
Pololu производит совместимые по выводам держатели/коммутационные платы для нескольких различных датчиков дальности ST (ToF). Все они функционируют как крошечные лидарные системы со встроенным лазером класса 1 с длиной волны 940 нм (то есть невидимым и безопасным для глаз) и все они основаны на одной и той же технологии FlightSense, которая точно измеряет, сколько времени требуется излучаемым импульсам инфракрасного лазерного света, чтобы достичь объектов и отразиться обратно в детектор. Этот подход обеспечивает абсолютные измерения расстояния независимо от условий окружающего освещения и характеристик цели (например, цвета, формы, текстуры и отражательной способности), хотя эти внешние условия влияют на максимальную дальность действия датчика. Все эти датчики имеют разрешение 1 мм, с некоторыми ограничениями для некоторых версий.



